EMJ47603 Autonomous Mobile Robots Assignment
- Subject Code :
EMJ47603
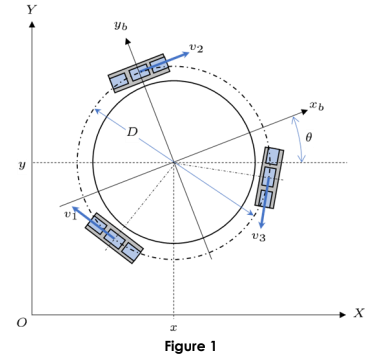
You are required to develop an omnidirectional mobile robot using three omni-wheels as shown in Figure 1. Solve the following:
(1) Construct the forward and inverse kinematics equations of the mobile robot with respect to the world coordinate frame, ?O. Assume that:

(2) Based on kinematics and appropriate diagrams, prove that the mobile robot is a holonomic mobile robot.
(3) Construct the wheels angular velocities vs time graph if the following tasks need to be completed in sequence. Given that D = 270 mm and the diameter of the wheel is 100 mm.

(4) Plot the estimated robots trajectory and find the final pose (position and orientation) if given the initial pose is (0 m, 0 m, 0 deg).